
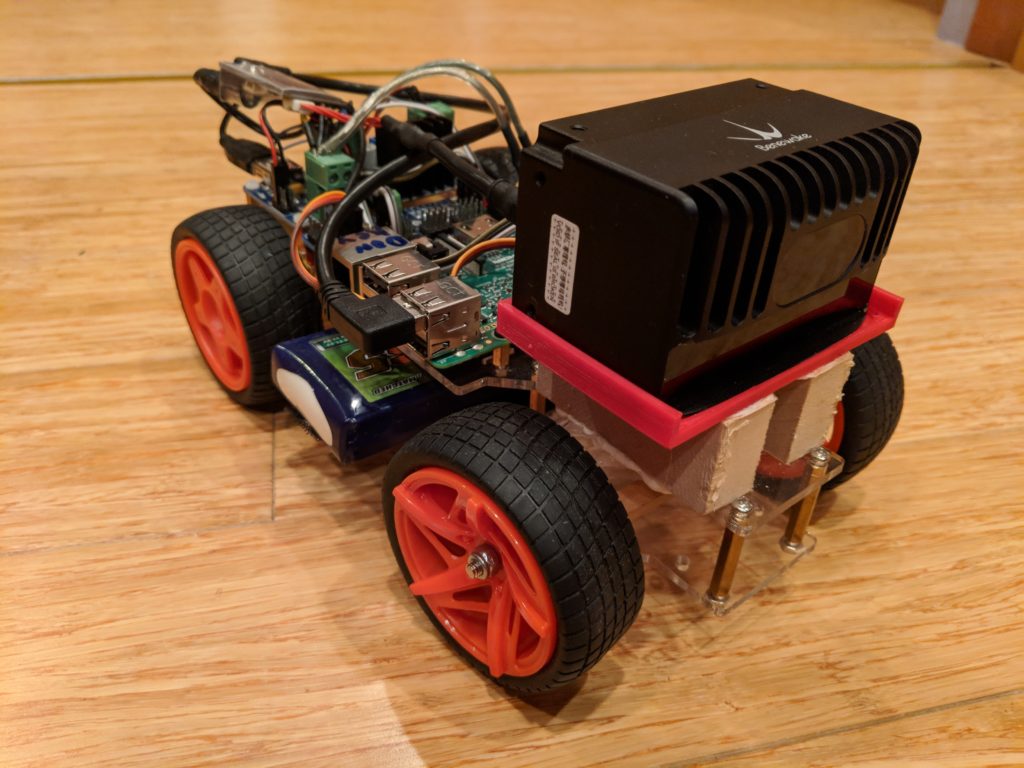
After my first hands-on experiments with the new Benwake CE30-A solid state LIDAR (the version that generate an obstacle position rather than a point cloud), I thought I’d see if it was sufficient to drive a car through an obstacle field. It is. Above is my first effort at doing that, using a commonly-available Sunfounder RaspberryPi-based robocar.
My RaspberryPi Python code is here.
A few lessons:
- You can run the Benwake CE30-A with the same 7.4v battery pack that you would use to drive the car. (It says it wants 12v but it works fine with less than that).
- If you want to create a shorter cable. the connectors used by the CAN-to-USB converter board are JST-GH 1.25mm 4-pin connectors. You can buy them here.
- You can 3D print a mount for the LIDAR. I’ve posted a 3D-printable file here. Just raise it above the steering servo with some blocks of wood as shown here:
Sunfounder has two different cars. The Picar-S and the Picar-V. With Picar-S sensors () are used and with Picar-V a Video Camera is used for object detection. Does it matter which of the variants are used, since you are betting on lidar?
Does your lidar code work with different lidar sensors?
Can you show a map? Maybe ocuppancy grid?
Have you tried a sensor fusion with the Picar sensors and the lidar sensor to achieve a better outcome or more efficiency?