
In the past 5 months we have seen performance improve greatly in our 1/10 scale “fastest lap” race format. When we started out cars were traveling about 1 m/s with the most recent races we see cars traveling at 3 m/s, with the fastest human drivers averaging around 8 m/s. With the next set of innovations, we expect cars to move into the 5-6 m/s range, closing the gap with human drivers. While this speed improvement does require introduction of new methods, we will be moving into a period of refinement rather than invention. So it is time to shake things up. 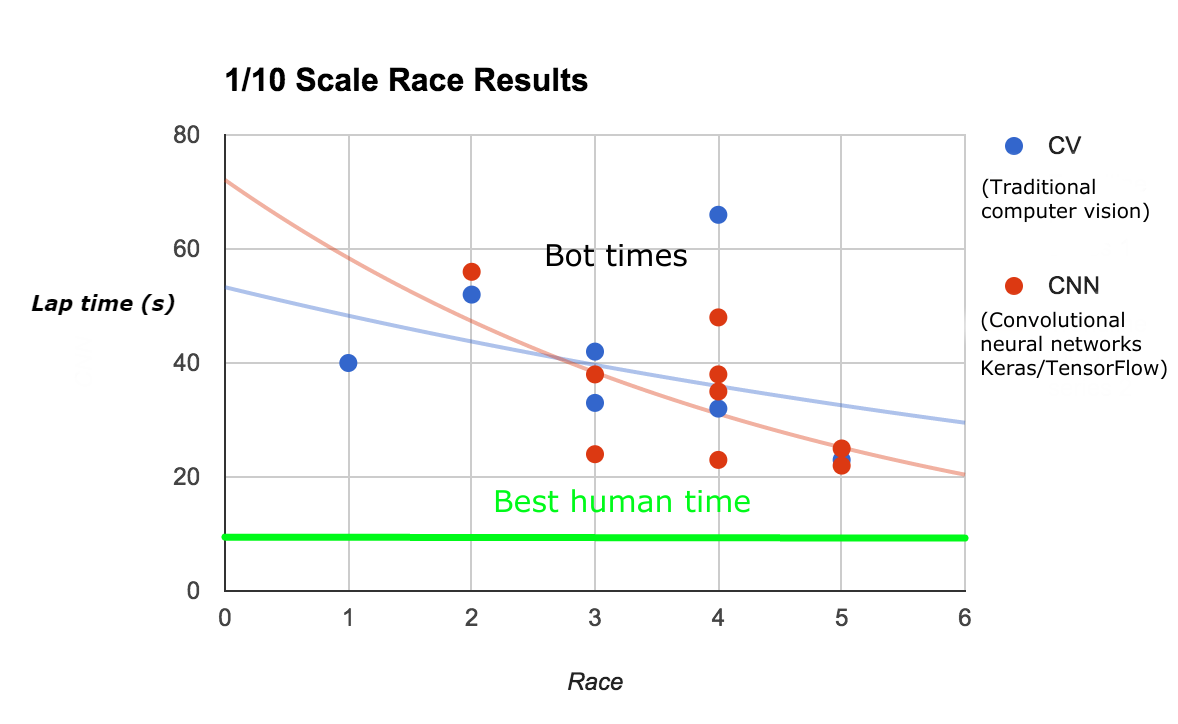
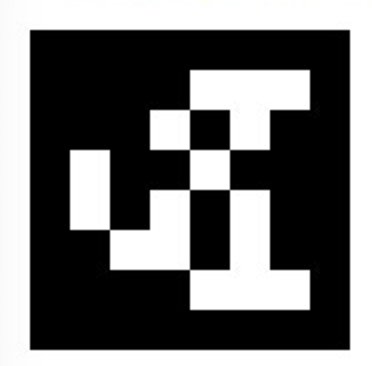
In order to encourage the next set of innovations, we are going change up the rules and lay out a timeline for wheel to wheel racing. This will happen over a course of months with intermediate milestones. To simplify this objective we will be using AR tags (specifically AprilTags) to identify the cars. This focuses the challenge on localization, and path planning rather than vehicle identification. Finally for those who want to focus solely on single lap performance, we will continue to have the single lap race.
There will be two races for the 1/10 scale cars:
The first race will be a single timed lap, shortest lap time wins, gets pole position and first seed for the wheel to wheel race. This is similar to our existing race.
The second race will be a wheel to wheel event and will race two cars at a time, if there are more than two cars participating the cars will be put into a seeded ladder. Each car will have a 10×10 cm 36h11 AprilTag attached to the back of the car vertically and within 3cm of the ground. Tags must remain vertical within +/- 10 degrees during the race. Minor collisions are to be expected, however a car that causes a collision that prevents a competitor from completing the race is grounds for forfeit or re-race as determined by the track master or other designated judge. The wheel to wheel race will be 3 laps.
Timeline:
- May 13 race: We will have AprilTags around to show to people and Andy Sloane will have a tech demo and sample code ready.
- June Race: In addition to our standard race, we will run an initial exhibition race where we will put stationary AprilTags on the track as obstacles. Cars that can avoid the obstacles and get around the track at the fastest speed win.
- July Race: Exhibition Wheel to Wheel! This will be our first Wheel to wheel race. Racers should be able to identify other cars and avoid them, but it is also a chance to test code and share techniques.
- August Race: First real wheel to wheel race!
Note: Timeline may be adjusted based how well we hit our milestones.
Request for comments. Please go to the DIYRobocars forum to discuss and comment. These rules are not locked in stone and I would like feedback. Please try to provide feedback soon, I would like to close on this by 5/15