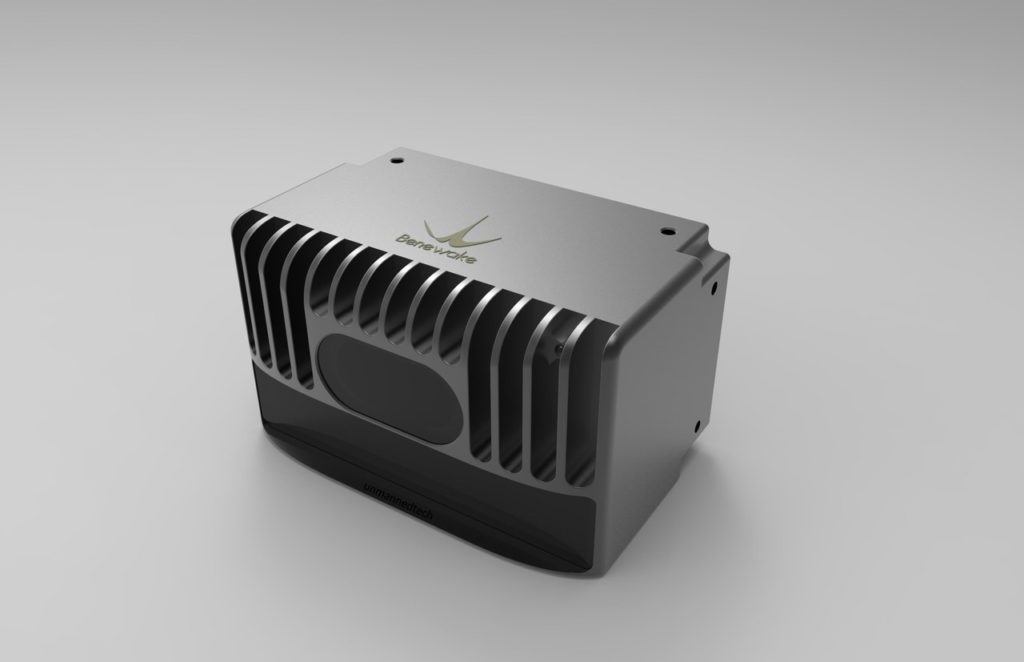
The era of small, cheap (sub-$1,000) Lidar is upon us, but it’s still a bit in its teething stage. In this post, I’ll give some initial hands-on impressions of one of the first solid-state 3D (actually closer to 2.5D) Lidars to hit the market, the Benewake CE30 series, which has just been released.
Unlike the other Lidars I’ve been using, such as the RP-Lidar A2/A3 series and (now discontinued) Scanse Sweep, which are rotating 2D Lidars (just viewing a thin horizontal disc around themselves), the CE30 has no moving parts and has both horizontal and (limited) vertical scanning (132° horizontal and 9° vertical), as well as an impressive 4m-30m range (depending on which version you get) as well as an excellent 20Hz refresh rate. That’s perfect for small autonomous cars like ours — solid state means nothing to break in a crash, and having a vertical as well a horizontal sweep means that we can see obstacles from ground level to above the car.
Initial testing confirms the 4m range, dropping to about 3.5m in bright sunlight outdoors, which is quite good.
Official pricing ranges from less than $1,000 to $1,500, depending on the version, but at volume they’ll be available for $400-$500. If you want to buy one now in single units, you can find them on Roboshop: the CE30-A (USB version) is currently $999, the CE30-C (ethernet version) is $1,195 and the CE30-D (long range) is $1,499.
Here’s a table that shows how they compare:
| CE30-A | CE30-C | CE30-D | |
|---|---|---|---|
| Max range | 4m | 4m | 30m |
| Interface | USB/CAN | Ethernet | Ethernet |
| Notes | Only obstacle detection | Point cloud, no built-in obstacle detection | Point cloud. 4mm larger in width and height |
| Typical single-unit price | $800 | $1,000 | $1,500 |
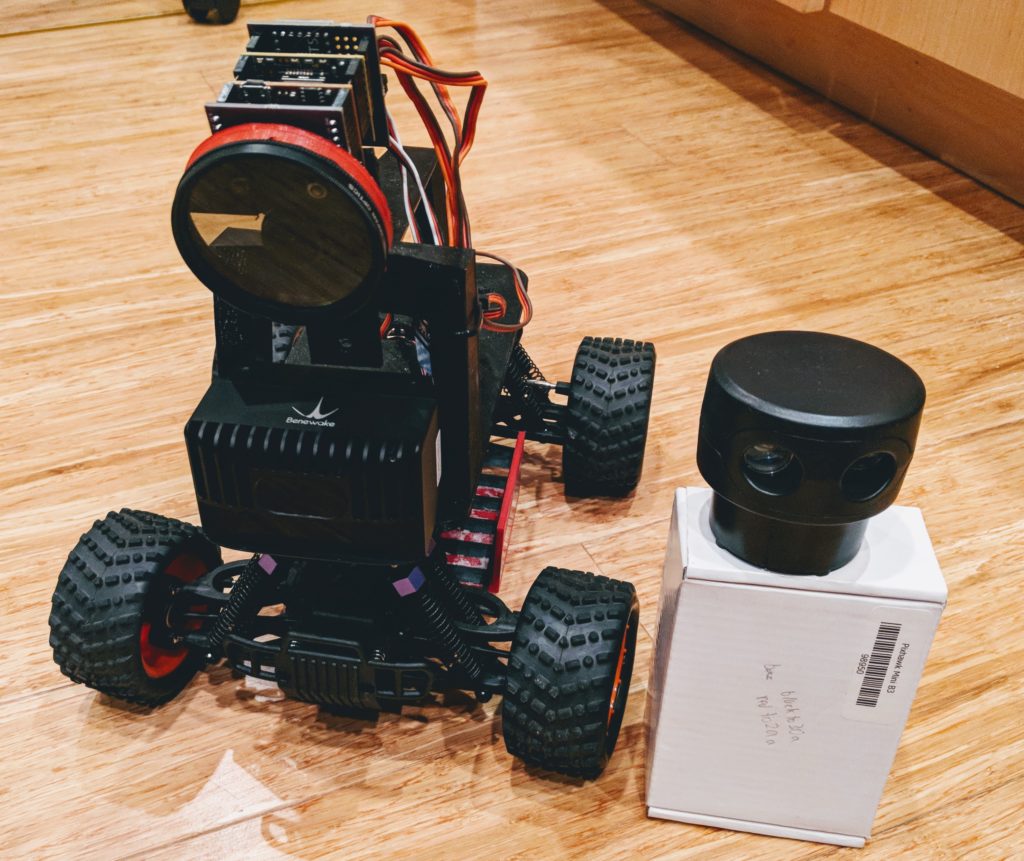
Size-wise, it’s about the same size as the 2D Lidars, which is to say just right for our cars. (It’s shown above mounted on a Donkeycar, next to a Scanse Sweep for comparison).
I’ve posted a mount for it here, which you can 3D print for your car:
Here’s a screen-capture of the sort of data it provides (me in my workshop waving my arms like a dork). The top window is the uncorrected depth map and the bottom window is a top-down view.
The software support is still pretty minimalistic: a Windows demo program (shown above) and C++ libraries for Windows and Linux (including ROS). The Linux library is designed for x86 computers and won’t compile on a RaspberryPi (which is ARM-based) yet, but Benewake says that compatibility is coming soon. Stay tuned while I wait for that — I’m particularly interested in the built-in obstacle detection mode of the CE30-A, but want to run it on the RPi.
[Update: CE30-C Python code that runs on RaspberryPi is here. CE30-A Python code is here]
One of the tricky things if you’re using the CE30-C (ethernet interface) with a RaspberryPi is figuring out how to talk to the Lidar on Ethernet at the same time you’re connected to the Internet (or another network) over Wifi. After a lot of research and asking around, I finally figured it out. Raspian (the RaspberryPi Linux distro) has been changing its networking configuration process with each version, which makes it hard to find reliable tutorials online, but for the latest version (Raspian Stretch), edit your etc/dhcpcd.conf file to include these two lines:
![]()
This will assign your Ethernet port to the CE30, while leaving your Wifi adapter free to connect to your regular Wifi network.
Needless to say, if you opt for the USB version (CE30-A) you don’t need to deal with this — it just shows up as a serial port.
Finally, here’s Benewake’s promotional video that shows what these Lidar’s are really designed for.
Next post will be after I get the software up and running in an autonomous car stack. But so far so good!
Benewake Solid-State LiDAR CE30【Update Log 2018.4.10】
Mechanical single channel LiDAR is pretty common in our life, but two problems cannot be neglected, i.e. short service life and high price due to the rotating measurement mode.
Benewake launches CE30, a solid-state LiDAR with large FoV. It could simultaneously output grey and depth information within 132° horizontal FoV and 9° vertical FoV. Meanwhile no mechanical rotating components exist internally, so higher reliability and stability could be ensured.
Based on the optimized obstacle avoidance mode, the region of interest (ROI) can be customized to focus on the obstacle information in the ROI and enable unimpeded driving. It can be applied in the general vehicle field, including Automated Guided Vehicle (AGV, such as intelligent warehouse vehicle), autopilot cars and industrial automation, etc.
Please refer to bw@benewake.com in case of further questions.
The update log of Benewake solid-state LiDAR CE30 is in the following.
Key point
1. Datasheet
2. User-defined ID/IP
3. Wide input voltage
1. Datasheet
The latest datasheets and operation manuals are available.
《DE-LiDAR CE30-A Datasheet – V011-EN》
《DE-LiDAR CE30-A operation manual – V008-EN》
《DE-LiDAR CE30-C Datasheet-V010-EN》
《DE-LiDAR CE30-C Operation Manual – V007》
Download: http://benewake.com/down.html
Consult: bw@benewake.com
2. User-defined ID/IP
1) CAN – obstacle avoidance mode:
a) User-defined Baud Rate – to match the baud rate of other devices in CAN bus
b) User-defined CAN-ID including data ID, heartbeat ID, command ID and config ID – to install multiple CE30-A devices in one CAN bus
See instructions in CE30-A Datasheet, page 10,Chapter 4.1.4.
2) Point-cloud IP
User-defined IP address – to install multiple CE30-C devices in one robot
See instructions in CE30-C Datasheet, page 11,Chapter 7.1.
3. Wide input voltage
The input voltage used to be 12V DC. Now it is updated to 11-25V.
In case of further questions, please refer to bw@benewake.com.
Thank you for your support!!!
The best way you could support the community is with Python example code or even a Python library. The AI/CV world is all Python these days and it would be great if this could work easily with that.
Thank you very much for your excellent work!Chris. In case of further questions, you could also refer to alice@benewake.com.
Thanks very much for your excellent work,Chris!In case of further questions, please refer to alice@benewake.com.
can we use arduino with this and can you provide me a circuit schematic for both rasberry pi and arduino if possible?
I bought this benewake CE 30 D LiDAR a year ago, it suddenly stopped working after its warranty period got over, the status LED’s are also not showing anything, when I contacted the Benewake company they said, I have to send the lidar to their company in china and I have to bear all the logistics expenses myself, they didn’t even give assurance this will work after they service it. Also, they didn’t suggest any calibration methods to fix the issue. Please help me to solve this issue.