Demo of Benwake CE30-A on a DIY Robocar
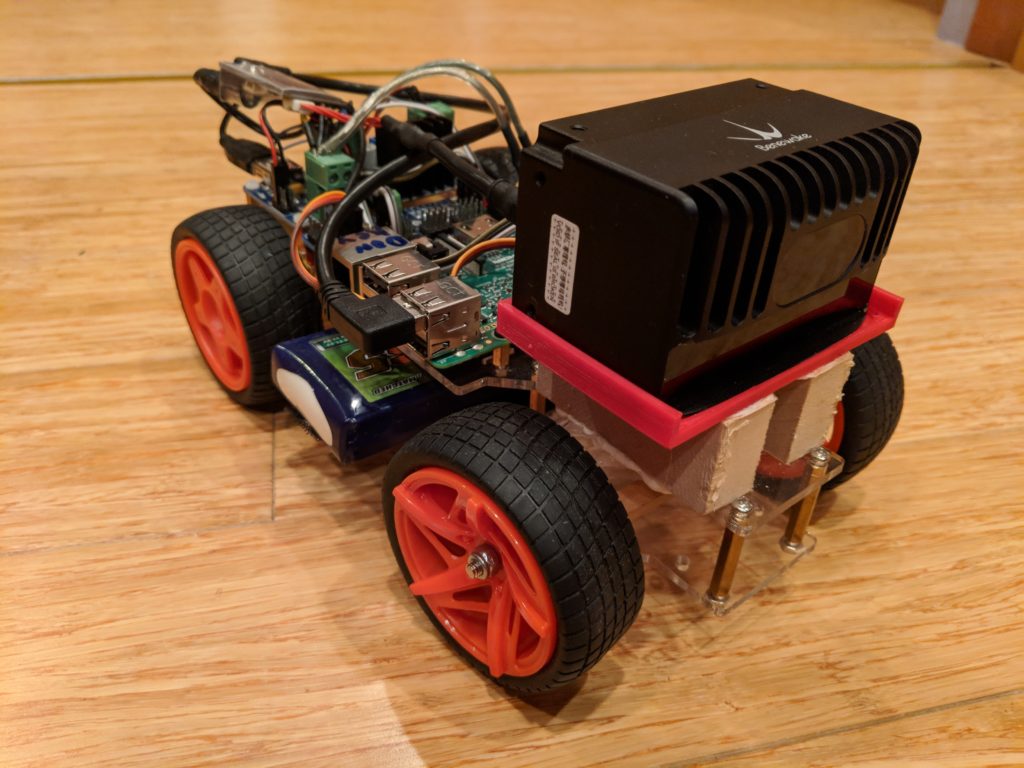
After my first hands-on experiments with the new Benwake CE30-A solid state LIDAR (the version that generate an obstacle position rather than a point cloud), I thought I’d see if it was sufficient to drive a car through an obstacle field. It is. Above is my first effort at doing that, using a commonly-available Sunfounder RaspberryPi-based robocar.
My RaspberryPi Python code is here.
A few lessons:
- You can run the Benwake CE30-A with the same 7.4v battery pack that you would use to drive the car. (It says it wants 12v but it works fine with less than that).
- If you want to create a shorter cable. the connectors used by the CAN-to-USB converter board are JST-GH 1.25mm 4-pin connectors. You can buy them here.
- You can 3D print a mount for the LIDAR. I’ve posted a 3D-printable file here. Just raise it above the steering servo with some blocks of wood as shown here: