The difference between proper RC cars and toys (when you’re turning them into robots)

What kind of car should you make autonomous? They all look the same! There are some amazing deals out there! How to choose??
I’m going to make it easy for you. Look for this:

What’s that? It’s a standard RC connector, which will allow you to connect steering and throttle to standard computer board (RaspberryPi, Arduino, etc). If you see that in car, it’s easily converted into autonomy. (Here’s a list of cars that will work great)
If you don’t see that, what you’ve got is CRAZY TOY STUFF. Don’t buy it!
But let’s say you already have, because you saw this cool looking car on Amazon (picture above) for just $49
By the looks of it, it’s got all this great stuff:
- HIGH PERFORMANCE MOTOR: Can Reach Speeds of Approximately Up to 15 MPH ·
- RECHARGEABLE LITHIUM BATTERY: High Performance Lithium-Ion Battery · Full Function Pro Steering (Go Forward and Backward, Turn Left and Right) · Adjustable Front Wheel Alignment
- PRO 2.4GHz RC SYSTEM: Uninterrupted, Interference-Free Driving · Race Multiple Cars at the Same Time
- Requires 6.4v 500mAh Lithium-Ion Battery to run (Included) Remote Control requires 9v Battery to run (Included)
- BIG 1:10 SCALE: Measures At a Foot and a Half Long (18″) · Black Wheels with Premium, Semi-Pneumatic, Rubber Grip Tires · Interchangeable, Lightweight Lexan Body Shell with Metal Body Pins and Rear Racing Spoiler · Approximate Car Dimensions, Length: 18″ Width: 8″ Height: 5″
But is it good for autonomy? Absolutely not. Here’s why:
When you get it, it looks fine:

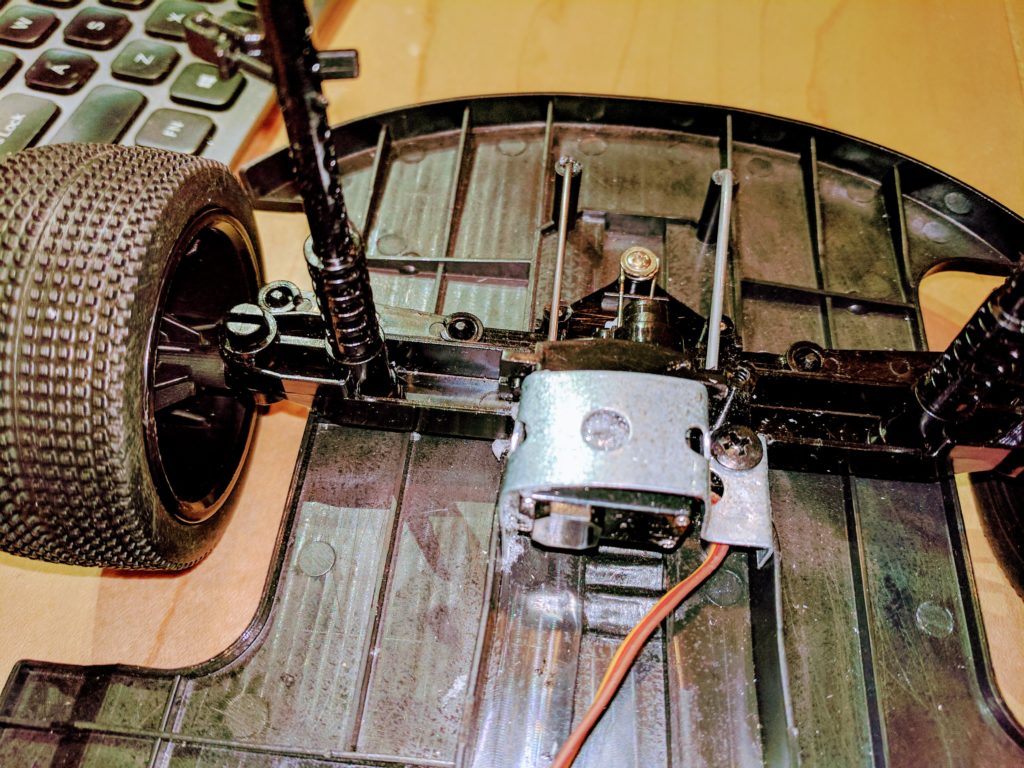
But what’s inside? Erk. Almost nothing:

That’s not servo-driven steering! 🙁 Instead, it’s some weird thing with a motor, some gears and a spring:

How about the RC? Yikes. Whatever this thing is, you can’t use it (it’s actually an integrated cheap-ass radio and motor controller — at any rate there’s no way to connect a computer to it)

So total write-off? Not quite.
Here’s what you have to do to make it usable:
First, you’ve to to put in a proper steering servo. Rip out the toy stuff, and put in a servo with metal gears (this one is good). Strap it in solidly, like I have with a metal strap here:
Now you have to put in a proper RC-style motor controller and power supply. These cheap cars have brushed motors, not brushless ones, so you need to get a brushed ESC. This one is fine, and like most of them has a power supply (called a BEC, or battery elimination circuit), too.
Now you can put in your RaspberryPi and all the other good stuff, including a proper LiPo battery (not that tiny thing that came with it).