Using a cheaper motor driver with the Minimum Rover
If you want to use a cheaper motor driver board ($7) for the OpenMV-based “Minimum Rover“, here’s how to hook it up:
You’ll need some female-to-female hookup wires ($6).
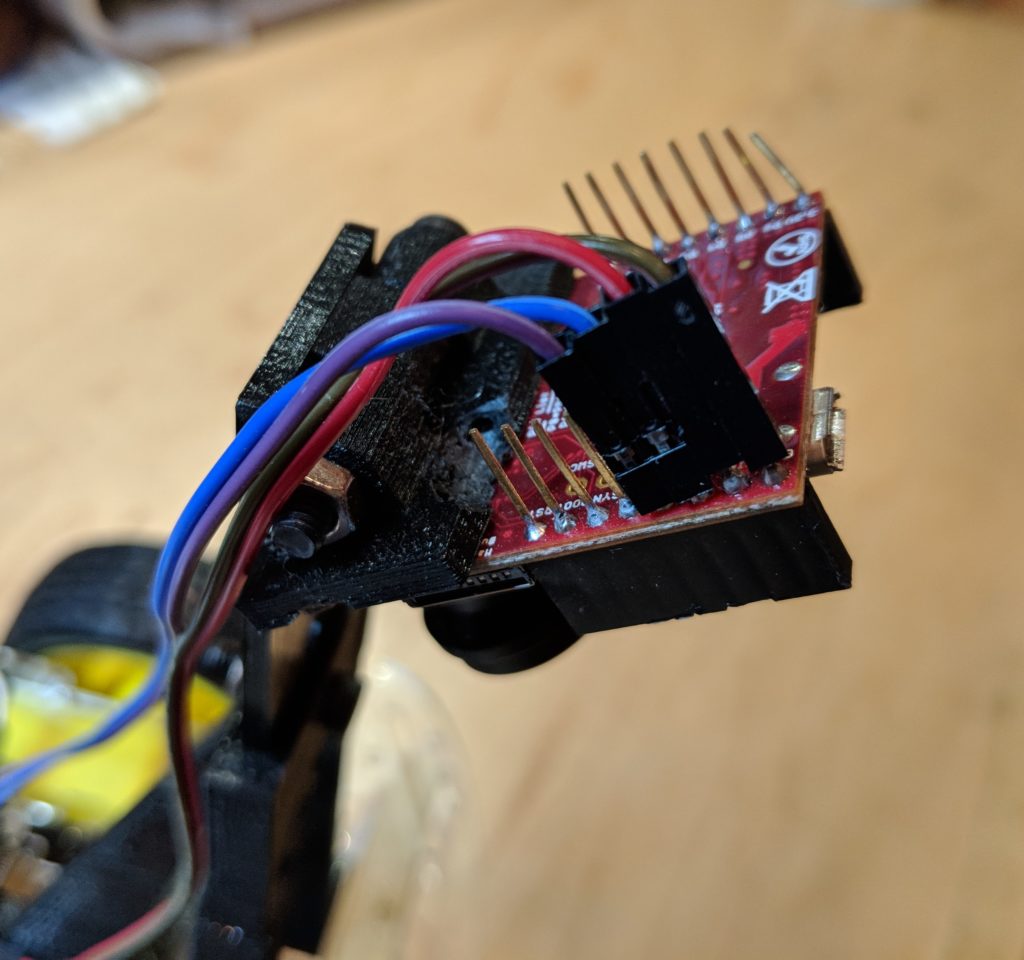
First, plug four wires into the OpenMV’s GND, VIN, P7 and P8 pins as shown
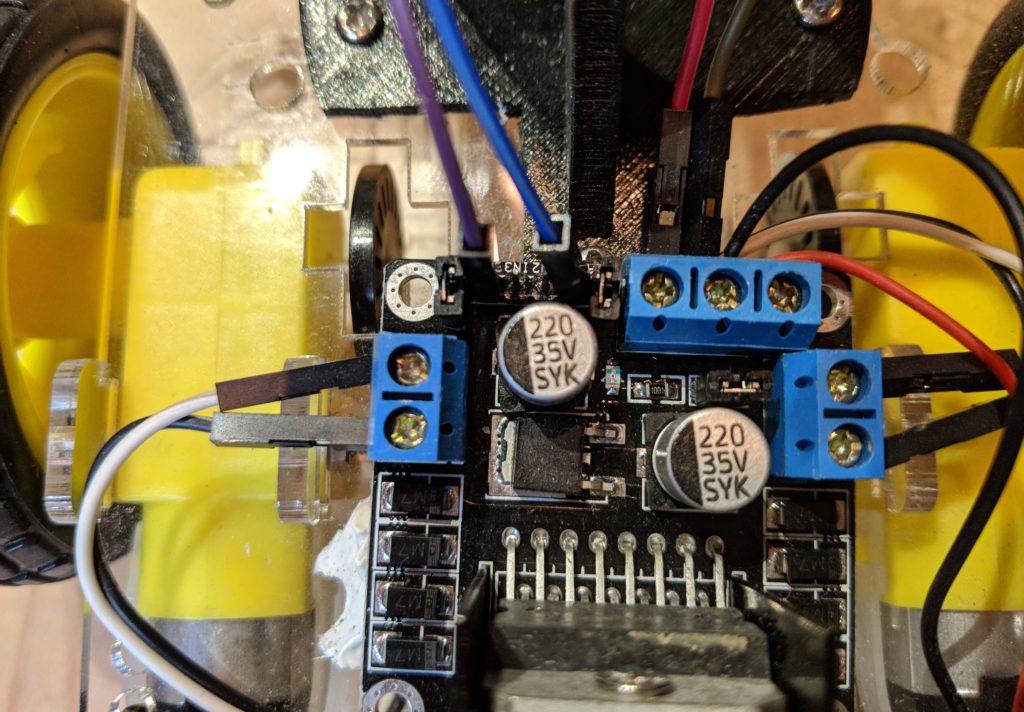
Then connect those four wires to the motor controllers as shown in the picture below:
- P7 goes in In1
- P8 goes to In4
- GND goes to GND
- VIN goes to +5V
Then connect the motor wires to the terminals on each side of the motor controller, right motor wires to right side terminals, and left side motor wires to left side terminals, as shown. The wires from the battery go to the GND and 12V terminals (cut off the connector and put the bare wire in the terminal and screw it down).
The code requires no modification to use this motor controller. It should work exactly the same as the OpenMV motor controller shield.